IPMSM의 D축 Q축 개념과 레졸버 영점 제어
영구자석 동기전동기(Permanent Magnet Synchronous Motor, PMSM)는 현대 모터 제어에서 중요한 위치를 차지하는 전기 기계로, 특히 벡터 제어(vector control) 기반의 구동 방식에서 D-Q 좌표계가 필수적으로 활용됩니다. 이 글에서는 PMSM의 D-Q 축 개념을 설명하고 IPMSM의 영구자석 위치센서인 레졸버 신호를 활용한 제어 기법에 대해 작성하겠습니다.
1. D-Q 좌표계의 개념
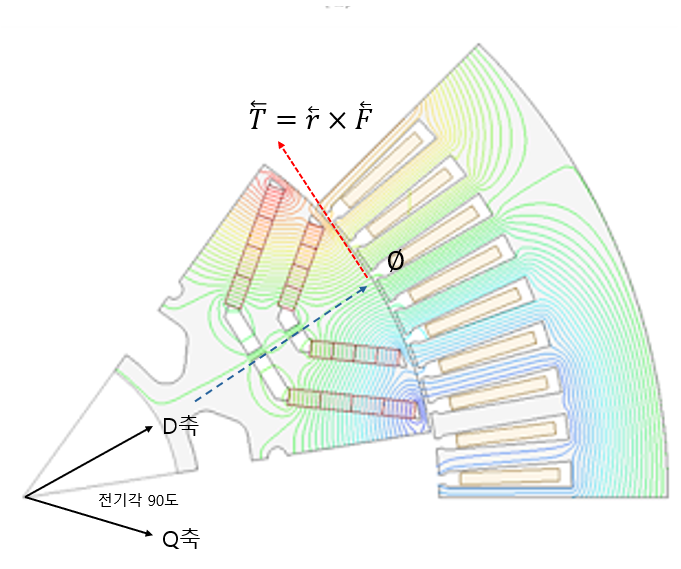
PMSM의 전자기적 모델을 해석할 때, 3상 정현파 전류(U/V/W 상)를 회전자의 자속 방향을 기준으로 한 직교 좌표계(D-Q 좌표계)로 변환하면 시스템의 동적 특성을 보다 효과적으로 분석할 수 있습니다. 이는 Clarke 및 Park 변환을 이용하여 계산할 수 있습니다.
Clarke 변환은 3개의 인자를 2개의 인자로 해석하는 방법으로 벡터 분리에 대한 이해가 있다면 쉽게 계산할 수 있습니다.
Park 변환은 정지좌표계를 회전좌표계로 반영하는 것이며 회전각인 Sin, Cos을 반영하면 됩니다.
따라서 Clarke-Park 변환에 대한 단순 수식 연산은 다루지 않고 이 글에서는 D축과 Q축의 모터 측면 물리적 해석을 알아복겠습니다.
| 정의 | 역할 | 제어 시 고려사항 | |
| D축 (Direct Axis) | 회전자의 영구자석 자속과 나란한 방향 | 자속 제어, 자속 위상 제어에 사용 | 자기 포화를 고려해야함 → 전력 변환 효율 등 |
| Q축 (Quadatue Axis) | D축과 직교 방향. 모터 토크를 생성하는 주요 축 | Q축 전류를 통한 토크 제어 | 역기전력에 의한 전압제한원 |
PMSM의 정상 상태에서 가장 효율적인 운전은 D축 전류를 없애는 경우이며, 이는 전류 벡터가 Q축에 정렬되어 최대 토크를 발생시킬 수 있도록 설계됩니다. (IPMSM은 릴럭턴스 토크로 인해 약간의 위상차를 고려해야합니다.)
2. IPMSM의 동적 모델과 수학적 표현
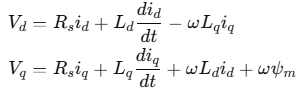
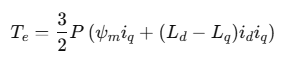
위 식은 IPMSM의 D축, Q축 전압과 토크를 수식으로 표현한 것입니다.
토크 식을 보면 Ld, Lq 등 각 자속 경로에 따른 인덕턴스가 식에 포함되어 있고, 각 축에 흐르는 전류가 토크의 크기를 결정합니다.
각 인덕턴스는 모터의 구조적 설계값에 의해 결정됩니다. 예를 들어 공극 길이라던가, 슬롯 오프닝, 자석이 표면부착형인지 회전자 내부에 있는지, 코어 재료의 투자율 등이 영향을 미칩니다.
그러나, 보통 모터는 기계적으로 대칭 형상을 이루며, 이는 Ld값과 Lq값이 거의 유사하다는 논리를 가져갈 수 있습니다.
(설계 공차가 크다면 이 논리를 가져갈 수 없고, 모터 제어가 어려워집니다.)
Ld=Lq가 같다고 가정하면, 토크식은 d축 전류항을 없앨 수 있게 됩니다.
즉, Q축 전류만으로 토크제어가 가능해집니다.
3. 레졸버의 영점 기준 설정과 D축 전류의 관계
인버터에서는 레졸버 영점을 정의할 때 모터 D축 전류가 사라지는 negative feedback을 반복합니다.
이는 인버터에서 모터 제어를 할 때 Q축 전류만으로 제어를 한다는 의미입니다.
Q축 전류만으로 모터를 제어하는 이유는 다음과 같습니다.
1) Q축 전류만으로 제어하는 이점 (일반적인 제어)
에너지 효율성 극대화: Ld = Lq이기에 D축 전류를 투입하더라도 토크에 의미가 없습니다.
따라서, D축 전류를 제거하여 모터에 공급하면 전체적인 시스템 효율이 증가합니다.
제어의 단순화: Q축 전류만을 사용하면 시스템의 응답성이 향상되며 정밀한 제어가 가능합니다.
자속 변동 방지: D축 전류가 0을 유지하면, 영구자석의 자속이 일정하게 유지된다는 의미.
자속이 일정하게 유지되므로 토크 리플이 감소하고 보다 안정적인 운전이 가능합니다.실제로, D축 전류가 과하게 입력되면, 자속이 뭉그러져 모터 제어가 어려워집니다.
2) D축 전류를 활용한 제어: 약계자 제어(Field Weakening Control)
일반적으로 PMSM 제어에서 D축 전류를 0으로 유지하는 것이 가장 효율적인 방법이지만, 특정 조건에서는 D축 전류를 활용하여 추가적인 최적화를 수행할 수도 있습니다.
- 고속 운전 시 역기전력 제한을 극복하기 위해 D축 전류를 음수로 주입하여 자속을 감소시킴.
- 이를 통해 높은 회전 속도에서도 안정적인 구동이 가능함
결론적으로, 일반적인 응용에서는 Q축 전류만을 사용하여 제어하는 것이 효율적이지만, 특정한 응용에서는 D축 전류를 활용하여 성능을 더욱 향상시킬 수 있습니다. 따라서 레졸버의 영점 기준을 D축 전류가 감지되지 않는 위치로 설정하면, 보다 정밀하고 효율적인 모터 운전이 가능해집니다.