모터를 제어하는 방법에 대해 알아보자
이번 글은 이전 포스팅을 보고 오시는 것을 추천드립니다.
IPMSM의 D축 Q축 개념과 레졸버 영점 제어
영구자석 동기전동기(Permanent Magnet Synchronous Motor, PMSM)는 현대 모터 제어에서 중요한 위치를 차지하는 전기 기계로, 특히 벡터 제어(vector control) 기반의 구동 방식에서 D-Q 좌표계가 필수적으로 활
bbodaemakeslife.tistory.com
모터는 전압을 인가하는데 인버터에서는 전류로 제어한다는 말이 있습니다.
그런데 또 막상 찾아보면 전압제어와 전류제어로 구분하고 있기도 하구요.
최근에 저희 회사에 직원이 관련 내용을 질문을 하길래 해당 내용이 제대로 정리된 것이 없는듯하여 정리해보았습니다.
먼저 다들 오해하기 쉬운 것부터 접근해보겠습니다.
1. 전압을 인가하는 것과 전류를 인가하는 것의 차이
보통 대학생분들 학교에서 배우실 때 책에서 보는 그림이 하나 있습니다.
바로, 모터 등가회로인데요. 아래 그림 같은 것일거에요.
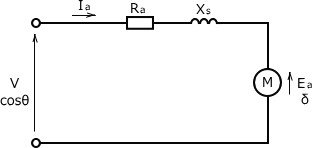
그런데 문제는 이걸 정확하게 이해하질 못하는 것 같습니다.
등가회로라고 해서 모터를 단순한 회로(RL 회로)로 해석해버리면, 모터에 전압을 인가 후 모터의 임피던스(Z)에 의해 전류가 자동으로 결정되는 것 아니냐, 그러면 전압의 크기만 바꾸면 되는건데 전류를 어떻게 제어하느냐 이런 질문이 나옵니다.
절대로 아닙니다!!
실제 모터에서는 전압을 가한다고 해서 원하는 전류가 항상 흐르는 것은 아닙니다.
그 이유는 모터의 특수한 전기적·기계적 특성 때문입니다.
(1) 기본적인 RL 회로에서의 관계
- 일반적인 회로에서는 다음과 같은 관계가 성립합니다. V = IZ, Z=R+jωL
- 이 식에 따르면, 전압을 인가하면 저항과 인덕턴스에 의해 전류가 자연스럽게 결정됩니다.
(2) 모터에서는 왜 전압을 가해도 전류가 일정하지 않을까?
모터는 단순한 RL 회로가 아니라, 역기전력(Back EMF)과 자기적 상호작용이 포함된 동적 시스템입니다. 실제 모터의 전압 방정식은 아래와 같습니다.
$$V = R I + L \frac{dI}{dt} + E_b$$
- 역기전력 (Eb): 속도가 증가할수록 증가하며, 전류의 흐름을 방해합니다.
- 전류 변화율: 인덕턴스에 의해 전류 변화가 지연됩니다.
- 자기포화 및 전기자 반작용(Armature Reaction): 전류와 자속의 상호작용으로 인해 비선형적인 효과가 발생합니다.
즉, 단순한 RL 회로에서는 V = IZ가 적용되지만, 모터에서는 역기전력, 전기자 반작용, 자기포화 등의 영향으로 인해 전압을 가한다고 해서 원하는 전류가 정확하게 흐르지 않습니다.
따라서, 전류를 원하는 값으로 조절하려면 전압을 정밀하게 제어해야 할 필요가 있습니다.
2. 전압제어(Voltage Control) vs. 전류제어(Current Control)
모터를 제어하는 방식은 크게 전압제어 방식과 전류제어 방식으로 나눌 수 있습니다.
- 전압제어 방식 (Voltage Control) 전류제어 방식 (Current Control)
| 제어 대상 | 전압 (V)을 직접 조절 | 전류 (I)를 직접 조절 |
| 전압과 전류 관계 | 전압을 가하면 전류가 자연스럽게 결정됨 | 전류를 목표 값으로 맞추기 위해 전압을 생성 |
| 역기전력 보상 | 보상하기 어려움 (속도 변화에 취약) | 전류 피드백을 통해 자동 보상 가능 |
| 토크 제어 | 어렵고 부정확함 | 직접적인 토크 제어 가능 (q축 전류) |
| 응답 속도 | 느림 (전압-전류 반응 속도 지연) | 빠름 (전류 피드백을 통해 즉각 조정 가능) |
| 적용 방식 | V/f 제어 (개루프), 속도제어 중심 | FOC, DTC (폐루프), 토크제어 중심 |
| 응용 분야 | 단순 부하(팬, 펌프), 유도모터 | 고정밀 서보모터, 전기차(EV, HEV), 로봇 |
전압제어 방식은 단순하지만, 부하 변화나 속도 변화에 대한 대응이 어렵고, 토크 제어가 불안정합니다.
전류제어 방식은 전류를 직접 제어하므로 원하는 토크를 정확하게 유지할 수 있으며, 부하 변화에도 강합니다.
이러한 차이는 IPMSM의 전압방정식을 보시면 이해하실 수 있습니다.
3. 전류제어 방식(FOC)에서 전압과 전류의 관계
전류제어 방식에서는 전압을 직접 조절하지 않고, 원하는 전류를 설정하면 전압이 자동으로 결정됩니다.
즉, 출력 전류를 목표 값으로 맞추기 위해 필요한 전압을 생성하는 방식입니다.
(1) FOC에서의 전압-전류 관계
- FOC는 d-q축 전류(Id, Iq)를 직접 제어하는 방식.
- 목표 전류(Id, Iq)를 정한 후, 현재 전류와 비교하여 전압을 생성하여 원하는 전류가 흐르도록 유도.
IPMSM의 전압방정식
$$V_d = R_s I_d + L_d \frac{dI_d}{dt} - \omega L_q I_q$$
$$V_q = R_s I_q + L_q \frac{dI_q}{dt} + \omega L_d I_d + \omega \lambda_m$$
IPMSM의 토크방정식
$$T_e=\frac{3}{2}p[\lambda _m I_q+(L_d-L_q)I_dI_q]$$
즉, 전압을 직접 조정하는 것이 아니라, 원하는 전류(Id, Iq)가 흐르도록 전압을 생성하여 인버터를 통해 출력하는 것입니다.
4. FOC에서 전류를 어떻게 조절하는가?
(1) 목표 전류 설정합니다.
- q축 전류(Iq)를 조절하여 토크를 생성.
- d축 전류(Id)를 조절하여 자속을 최적화.
(2) 전류를 측정한 다음 및 피드백을 합니다.
- 전류 센서(CT, Hall Sensor)로 현재 전류(Id,Iq)를 측정.
- 목표 전류와 비교하여 오차를 계산.
(3) 전류 오차를 최소화하는 전압 생성합니다.
- PI 제어기를 사용하여 보상 전압(Vd,Vq) 계산.
- 아래 IPMSM의 전압방정식에 Id, Iq를 입력하여 보상전압을 계산합니다.
$$V_d = R_s I_d + L_d \frac{dI_d}{dt} - \omega L_q I_q$$
$$V_q = R_s I_q + L_q \frac{dI_q}{dt} + \omega L_d I_d + \omega \lambda_m$$
(4) 전압을 생성하여 인버터에서 출력
- 계산된 전압을 3상 전압(Va,Vb,Vc)으로 변환. (Park-Clarke Transform)
- SVPWM을 이용해 인버터가 최적의 전압을 출력.
(5) 모터에서 원하는 전류가 흐르게 됨
- 모터는 전압을 받지만, FOC의 정밀한 전압 조절 덕분에 원하는 전류가 정확히 흐르게 됩니다.
- 결과적으로, 토크와 속도를 정밀하게 제어가 가능해집니다.
5. 결론
(1) 모터에서 전압과 전류의 관계
- 일반적인 RL 회로에서는 V=IZ가 적용되지만, 모터에서는 역기전력, 전기자 반작용, 자기포화 등의 영향으로 인해 전압을 가한다고 해서 원하는 전류가 자동으로 흐르지 않습니다.
- 따라서, 정밀한 제어를 위해서는 전압이 아니라 전류를 직접 제어하는 것이 더 효과적입니다.
(2) 전압제어 vs 전류제어
- 전압제어(V/f 제어): 단순하지만, 부하 변화에 취약하고 토크 제어가 어렵습니다.
- 전류제어(FOC, DTC): 원하는 토크를 정밀하게 유지할 수 있으며, 응답 속도가 빠르고 부하 변화에도 강합니다.
(3) FOC에서 전류를 어떻게 제어하는가?
- FOC는 전류를 직접 입력하는 것이 아니라, 전압을 조절하여 원하는 전류가 흐르도록 유도.
- 이를 위해 전류 피드백을 받아 전압을 생성하고, SVPWM을 사용하여 인버터에서 전압을 출력.
